
中文总结
本教程旨在教授如何在URDF(统一机器人描述格式)中定义可移动关节,以构建一个具有活动部件的机器人模型。在之前的教程中,我们创建了一个R2D2模型,但其所有关节都是固定的。现在,我们将探索三种重要的关节类型:连续关节(continuous)、旋转关节(revolute)和棱柱关节(prismatic),并将它们应用到R2D2模型中,使其关节能够活动。
1. 连续关节(Continuous Joint)
- 应用实例:头部旋转关节(
head_swivel) - 特点:可以无限旋转,没有固定的上下限。
- 配置:需要指定旋转轴(
axis)和原点(origin)。在本例中,头部围绕z轴旋转,因此旋转轴设置为“0 0 1”。
2. 旋转关节(Revolute Joint)
- 应用实例:夹持器关节(
left_gripper_joint和对应的右夹持器关节) - 特点:可以旋转,但有固定的上下限。
- 配置:除了旋转轴和原点外,还需要指定旋转限制(
limit),包括最大努力(effort)、最小角度(lower)、最大角度(upper)和最大速度(velocity)。在本例中,夹持器关节在0到0.548弧度(约31.4度)之间旋转。
3. 棱柱关节(Prismatic Joint)
- 应用实例:夹持器臂(
gripper_extension) - 特点:沿一条直线移动,而不是旋转。
- 配置:需要指定移动限制,单位为米。在本例中,夹持器臂在-0.38米到0米之间移动。
4. 其他关节类型
- 平面关节(Planar Joint):可以在二维平面内移动。
- 浮动关节(Floating Joint):可以在三维空间内自由移动,没有约束。
这些关节类型在本教程中没有详细介绍,因为它们需要更复杂的配置。
5. 指定姿态(Pose)
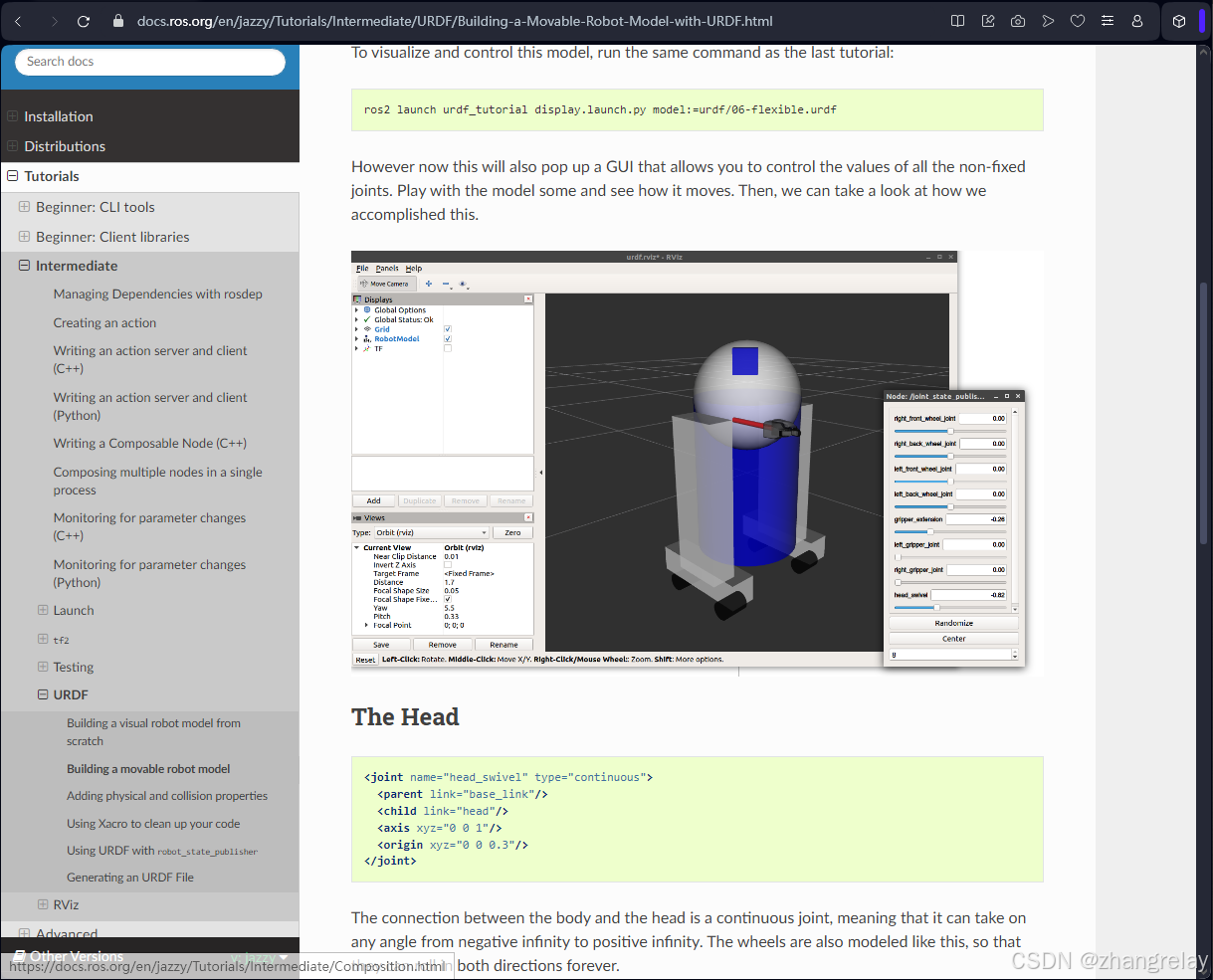
- 当在GUI中移动滑块时,模型在Rviz中移动。这是通过解析URDF,找到所有非固定关节及其限制,并使用滑块的值发布
sensor_msgs/msg/JointState消息来实现的。 robot_state_publisher使用这些消息计算不同部件之间的所有变换。- 结果变换树用于在Rviz中显示所有形状。
本教程旨在教授如何在URDF(统一机器人描述格式)模型中添加碰撞和物理属性,以及如何为关节添加动力学属性。以下是本教程内容的详细中文总结:
碰撞属性(Collision)
-
定义:在URDF中,除了定义机器人的视觉外观(通过
visual标签)外,还需要定义碰撞属性(通过collision标签)。这是为了使机器人能够在模拟环境中进行碰撞检测和交互。 -
结构:
collision标签是link对象的直接子元素,与visual标签处于同一层级。它使用与visual相同的geometry标签来定义形状。 -
用途:
- 简化处理:碰撞检测对于复杂网格来说计算量大,因此可以在
collision标签中使用更简单的几何形状来替代。 - 安全区域:通过定义特定的碰撞几何形状,可以限制机器人部件的运动范围,从而避免与敏感设备的碰撞。
- 简化处理:碰撞检测对于复杂网格来说计算量大,因此可以在
物理属性(Physical Properties)
- 惯性(Inertia):
- 每个需要模拟的
link元素都需要一个inertial标签。 mass属性定义质量(单位:千克)。inertia属性是一个3x3的旋转惯性矩阵,用于描述物体绕其质心的旋转惯性。对于简单的几何形状,可以使用公式计算其惯性张量。- 可以使用
origin标签来指定质心和惯性参考系(相对于link的参考系)。
- 每个需要模拟的
- 接触系数(Contact Coefficients):
- 在
collision标签下,可以使用contact_coefficients子元素来定义链接在接触时的行为。 - 包括三个属性:
mu(摩擦系数)、kp(刚度系数)和kd(阻尼系数)。
- 在
关节动力学(Joint Dynamics)
-
定义:关节的动力学属性通过
dynamics标签来定义,它决定了关节的运动方式。 -
属性:
friction:物理静摩擦力。对于棱柱关节,单位是牛顿;对于旋转关节,单位是牛顿米。damping:物理阻尼值。对于棱柱关节,单位是牛顿秒/米;对于旋转关节,单位是牛顿米秒/弧度。
-
默认值:如果未指定,这些系数默认为零。
其他标签(Other Tags)
- 在纯URDF中(不包括Gazebo特定标签),还有两个标签可以帮助定义关节:
calibration和safety controller。这些标签在本教程中未详细介绍,但可以在URDF规范中找到相关信息。
下一步
- 在掌握了如何在URDF中添加碰撞和物理属性后,你可以进一步探索如何使用这些属性来优化你的机器人模型,使其在模拟环境中更加真实和可靠。
- 还可以考虑使用xacro来简化URDF文件的编写,提高代码的可读性和可维护性。
通过本教程,你应该能够了解如何在URDF中添加碰撞和物理属性,以及为关节添加动力学属性,这将为你进一步开发机器人应用提供有力的支持。
练习题
单选题
-
在URDF中,哪种关节类型允许无限旋转,没有固定的上下限?
A. 棱柱关节(Prismatic Joint)
B. 旋转关节(Revolute Joint)
C. 连续关节(Continuous Joint)
D. 平面关节(Planar Joint)答案:C
-
在配置旋转关节时,哪个属性用于指定关节旋转的最大角度?
A. axis
B. origin
C. upper
D. velocity答案:C
-
在URDF中定义棱柱关节时,需要指定哪种限制?
A. 旋转限制(limit)
B. 移动限制(translational limit)
C. 最大努力(effort)
D. 最小角度(lower)答案:B(注意:在URDF中,棱柱关节的限制通常称为“translation”或“移动限制”,但直接选项“translational limit”可能不是标准术语,但在此上下文中理解为沿直线的移动限制,故选择B作为最接近的答案)
-
在Rviz中显示机器人模型时,哪个组件负责计算不同部件之间的所有变换?
A. robot_state_publisher
B. joint_state_publisher
C. rviz_visualizer
D. urdf_parser答案:A
-
xacro的主要功能是什么?
A. 解析URDF文件
B. 简化URDF文件的代码
C. 在Rviz中显示机器人模型
D. 控制机器人的物理行为答案:B
多选题
-
下列哪些关节类型在URDF中需要指定旋转轴(axis)?
A. 连续关节(Continuous Joint)
B. 旋转关节(Revolute Joint)
C. 棱柱关节(Prismatic Joint)
D. 平面关节(Planar Joint)答案:A, B, D(连续关节、旋转关节和平面关节都需要指定旋转轴,而棱柱关节不需要)
-
在配置URDF文件中的旋转关节时,可能需要设置哪些属性?
A. 旋转轴(axis)
B. 原点(origin)
C. 最大努力(effort)
D. 移动限制(translational limit)答案:A, B, C(旋转关节需要设置旋转轴、原点以及可能的旋转限制,包括最大努力等,而移动限制是棱柱关节的属性)
判断题
-
棱柱关节允许机器人部件在三维空间内沿任意方向移动。()
答案:错误(棱柱关节只允许沿一条直线移动)
-
使用xacro可以显著减少URDF文件的冗余和复杂性。()
答案:正确(xacro通过宏、变量和包含等功能,确实可以简化URDF文件的编写)
单选题
-
在URDF中,用于定义机器人部件的视觉外观的标签是?
A.collision
B.visual
C.inertial
D.geometry答案:B
-
下列哪个属性用于定义URDF中link元素的质量?
A.inertia
B.mass
C.mu
D.kp答案:B
-
在URDF中,用于定义碰撞检测时使用的几何形状的标签是?
A.collision
B.visual和collision
C.geometry
D.inertial答案:C(但需注意
geometry是在collision和visual标签内使用的)(注:此题存在细微歧义,因为
geometry是嵌套在collision或visual内的。但根据题目要求选择最直接相关的标签,C是正确答案,因为它直接定义了形状。) -
关节的物理静摩擦力通过哪个属性来定义?
A.damping
B.friction
C.mass
D.inertia答案:B
-
在URDF中,用于描述物体绕其质心的旋转惯性的属性是?
A.mass
B.geometry
C.inertia
D.mu答案:C
多选题
-
以下哪些属性可以在URDF的
contact_coefficients子元素中定义?
A.mu(摩擦系数)
B.kp(刚度系数)
C.kd(阻尼系数)
D.mass(质量)答案:A, B, C
-
在URDF中,哪些标签可以帮助定义关节的属性(不包括Gazebo特定标签)?
A.dynamics
B.calibration
C.safety controller
D.inertial答案:B, C(虽然
dynamics也是关节相关的,但它是直接定义关节动力学的,而题目要求不包括直接定义关节动力学的标签,因此更侧重于关节的辅助定义标签)
判断题
-
在URDF中,
collision标签的geometry可以比visual标签的geometry更复杂,以提供更精确的碰撞检测。答案:错(实际上,为了简化计算,
collision标签中的geometry通常会比visual标签中的更简单) -
如果在URDF中没有为关节指定
dynamics属性,那么这些属性的默认值将为零。答案:对
